നീലർ ഷെവി
(വാഷിങ്ടണ് പോസ്റ്റ്)
റോബോട്ടുകള് കൂടുതല് കൂടുതല് മനുഷ്യരായി മാറുകയാണ്. ഇത് അവിശ്വസനീയമായ ശാസ്ത്രകല്പിതകഥപോലെ നിങ്ങള്ക്ക് തോന്നാം. എന്നാല് ഇതുവരെയില്ലാത്തവിധം മനുഷ്യന്റെ സ്വഭാവ ഗുണങ്ങള് പ്രകടിപ്പിക്കാന് റോബോട്ടുകള്ക്ക് കഴിഞ്ഞുതുടങ്ങിയിരിക്കുന്നു. മനുഷ്യരെപ്പോലെ മണംപിടിക്കാനും സംവേദിക്കാനും ചുറ്റുപാടുകൾ നിരീക്ഷിക്കാനും പറ്റുന്നതുവഴി പൊതുവെ ആളുകൾ ചെയ്യാൻ മടിക്കുന്ന അപകടകരവും വൃത്തിഹീനവും മടുപ്പിക്കുന്നതുമായ ജോലികൾ കൂടുതൽ സ്വതന്ത്രമായി കൈകാര്യം ചെയ്യാനും നടപ്പാക്കാനുമാകുന്നു.
ഈ റോബോട്ടുകള്ക്ക് വാതകചോർച്ചകൾ മണത്തറിയാനും വെള്ളത്തിനടിയിൽ കാവൽ നിരീക്ഷണം നടത്താനും പെട്ടികൾ രൂപവും നിറവും നോക്കി തക്കതായ പത്തായങ്ങളിലേക്ക് മാറ്റാനും കഴിയും. സെൻസർ സാങ്കേതികവിദ്യയിലും സോഫ്റ്റ് വെയറിലുമുണ്ടായിട്ടുള്ള വളര്ച്ച ഒരു നിയന്ത്രകൻ ഇല്ലാതെതന്നെ എങ്ങനെ മണം പിന്തുടരണമെന്നും എവിടേക്ക് നീങ്ങണമെന്നുമുള്ള തീരുമാനങ്ങള് ഞൊടിയിടയ്ക്കുള്ളിൽ എടുക്കാൻ ഈ യന്ത്രങ്ങളെ സജ്ജരാക്കിയിരിക്കുന്നു.
“ഗന്ധമായാലും സ്പർശമായാലും നമ്മുടെ ശബ്ദങ്ങൾ തിരിച്ചറിയുന്ന കാര്യമായാലും അവ മനുഷ്യരുടെ ശേഷികൾ സ്വായത്തമാക്കുകയാണ് ചെയ്യുന്നത്.” റോബോട്ടിക്സിൽ ഡോക്ടെറേറ്റുള്ള റോബോട്ടുകൾ വഴിതെറ്റിയാൽ എന്ത് സംഭവിക്കും എന്ന് വിവരിക്കുന്ന ‘റോബോകാലിപ്സ്’ എന്ന ടെക്നോ-ത്രില്ലറിന്റെ രചയിതാവുമായ ഡാനിയൽ എച്. വിൽസൺ പറയുന്നു. “മനുഷ്യന്റെ പ്രശ്നങ്ങൾ പരിഹരിക്കണമെങ്കിൽ അവ മനുഷ്യന്റെ കഴിവുകളും സ്വായത്തമാക്കേണ്ടതുണ്ട്. റോബോട്ടുകൾ നമ്മുടെ ജീവിതത്തിൽ ഒരു പങ്കു വഹിക്കുകയാണെങ്കിൽ അവ മാനസിലാക്കേണ്ട കാര്യങ്ങള് ഇതാണ്.”

ചെറിയ ഇൻഫ്രാറെഡ് സെൻസറുകളുടെ സഹായത്തോടെയാണ് ഇതുവരെ തടസങ്ങളിൽ തട്ടി വീഴാതെ റോബോട്ടുകള് രക്ഷപ്പെട്ടുപോയിരുന്നത്. ചിലവ നിയന്ത്രകർക്ക് ചിത്രങ്ങൾ അയയ്ക്കുന്ന വീഡിയോ ക്യാമറകളെ ആശ്രയിച്ചും. പക്ഷേ, പുതുതലമുറ റോബോട്ടുകള്ക്ക് ശബ്ദങ്ങൾ തിരിച്ചറിയാനും മനുഷ്യരെപ്പോലെ അതേ മാനത്തില്ത്തന്നെ വസ്തുക്കളെ കാണാനും കൈകൊണ്ട് പിടിക്കാനും സാധിക്കുന്നുണ്ട്.
തീർച്ചയായും ഇവയിൽ ഒന്നും തന്നെ ഐസക് അസിമോവിന്റെ നോവലായ (പിന്നീട് ചലച്ചിത്രമായ) ‘ഐ, റോബോ’ട്ടിലെ സോണി എന്ന യന്ത്രമനുഷ്യനെപ്പോലെ ജീവസ്സുള്ളവയല്ല. സോണി സ്വയം ചിന്തിക്കുകയും തനിയേ നീങ്ങുകയും മിതമായ രീതിയിൽ വികാരം പ്രകടിപ്പിക്കുകയും ചെയ്യും. മികച്ച ഗ്രഹണശേഷികളുള്ള പല റോബോട്ടുകളും ഇപ്പൊഴും പരീക്ഷണഘട്ടത്തിലാണ്. അവ പരീക്ഷണശാലകളിൽ നന്നായി വർത്തിക്കുന്നെങ്കിലും യഥാർത്ഥലോകസാഹചര്യങ്ങൾ കൈകാര്യം ചെയ്യാൻ കെല്പ്പുള്ളവയല്ല.
ഉദാഹരണത്തിന്, പെട്ടികൾ തരംതിരിക്കുന്ന റോബോട്ടിന്റെ കാര്യമെടുക്കുക. ഈ റോബോട്ട് ഒരു പെട്ടിയുടെ രൂപവും വലുപ്പവും “നോക്കി” അത് എവിടേയ്ക്ക് നീക്കണമെന്ന് തിരുമാനിക്കുന്നതിനായി ദ്വിമാന-ത്രിമാനതലങ്ങളിലുള്ള വിഡിയോ ക്യാമറകളും സോഫ്റ്റ് വെയറുകളും ഉപയോഗിക്കുന്നുണ്ട്.“ പെട്ടികൾ ശരിക്കും നല്ല ചതുരത്തിലുള്ളവയും ചലിക്കാത്തവയുമായിരിക്കുന്നിടത്തോളം ഈ റോബോട്ട് നല്ലമട്ടിൽ പ്രവർത്തിക്കും”, റോബോട്ടിന്റെ കണ്ടുപിടിത്തത്തിന് തുടക്കമിട്ട ഇൻഡസ്ട്രിയൽ പെർസെപ്ഷന്റെ സ്ഥാപകരിലൊരാളും സ്റ്റാൻഫോർഡ് സർവ്വകലാശാലയിൽ കംപ്യൂട്ടര് ശാസ്ത്ര പ്രൊഫസറുമായ ഗാരി ബ്രാഡ്സ്കി പറയുന്നു. പക്ഷേ മെയ്ൽറൂമിലോ വ്യവസായശാലയിലോ പണിയെടുക്കുന്ന മനുഷ്യത്തൊഴിലാളികൾക്കു പകരം നിൽക്കാൻ ഇത് പൂർണ്ണമായും സന്നദ്ധമായിട്ടില്ല.
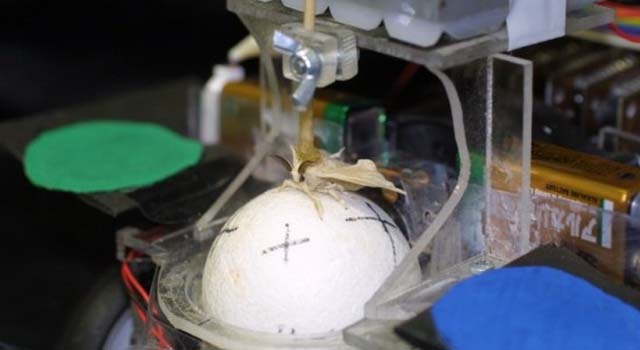
റോബോട്ടുകളെക്കൊണ്ട് മണം പിടിപ്പിക്കുക വലിയ വെല്ലുവിളികളിലൊന്നാണ്. ടോക്യോ സർവ്വകലാശാല അടുത്ത കാലത്ത് തുടങ്ങിയ ഒരു പദ്ധതി ഈ വഴിക്കാണ് ചുവടുവെക്കുന്നത്. അടുത്തിടെ അവിടെ പെൺപട്ടുനൂൽശലഭത്തിന്റെ മയക്കുന്ന ഫെറമോൺ ഗന്ധത്തോട് പ്രതികരിക്കുന്ന ആൺപട്ടുനൂൽപ്പുഴുവിനാൽ ചലിപ്പിക്കപ്പെടുന്ന ഒരു കുഞ്ഞൻ റോബോട്ടിനെ ശാസ്ത്രജ്ഞർ പരിചയപ്പെടുത്തുകയുണ്ടായി.കമ്പ്യൂട്ടർ മൗസിനകത്ത് ഉപയോഗിക്കുന്ന ഒരു ട്രാൿബോളിന്റെ മുകളിലെന്നപോലെ ഗന്ധത്താൽ പ്രചോദിക്കപ്പെടുന്ന ശലഭം ഇണചേരൽ നൃത്തം നടത്തുമ്പോള് ചലിക്കുന്നതരത്തില് മോട്ടോർ ഘടിപ്പിച്ച ചക്രങ്ങളോടുകൂടിയ ഒരു കാർ ഗവേഷകർ ഇതിനായി നിർമ്മിച്ചു. സെന്സറുകള് പുറത്തുവിടുന്ന ചലനങ്ങള് പെണ് റോബോട്ടിന്റെ മോട്ടര് പിടിച്ചെടുക്കുകയും ആണിന്റെ പാതപിന്തുടരുകയുമാണ് ചെയ്യുന്നത്.
ഗവേഷകർ വിശദീകരിക്കുന്നത് ഇങ്ങനെയാണ്, “ജന്തുക്കളുടെ മണംപിന്തുടരുന്ന സ്വഭാവം ഒടുവിൽ സ്വയം പ്രവർത്തിക്കുന്ന റോബോട്ടുകളിലും പ്രയോഗിക്കാൻ പറ്റി. അങ്ങനെ സൂക്ഷ്മസംവേദിയായ സെൻസറുകൾ ഘടിപ്പിച്ചുകഴിയുമ്പോൾ അവയ്ക്ക് ചുറ്റുപാടും തള്ളപ്പെടുന്ന മണം പിന്തുടരാനും അതിന്റെ ഉറവിടം കണ്ടെത്താനും കഴിയുന്നു.”
ശലഭറോബോട്ടിന്റെ പിന്നിൽ പ്രവർത്തിച്ച ടോക്യോ സർവ്വകലാശാലയിൽ റിസർച്ച് സെന്റര് ഫോർ അഡ്വാൻസ്ഡ് സയൻസ് ആൻഡ് ടെൿനോളജിയിലെ അസോസിയേറ്റ് പ്രൊഫസർ നൊരിയാസു ആൻഡോ ഒരു ഇ-മെയിലിൽ ഇങ്ങനെ പറഞ്ഞു: പട്ടുനൂൽശലഭം ഇടയ്ക്കിടെ വട്ടംകറങ്ങുകയും വേഗത്തിൽ ചലിക്കുകയും ചെയ്യുന്നതിനാൽ കമ്പികളുടെ കെട്ടുപാടുകളിൽനിന്ന് സ്വതന്ത്രമായി, സ്വയം പെരുമാറുന്ന ഒരു റോബോട്ടിനെ വികസിപ്പിക്കുകയായിരുന്നു ഞങ്ങളുടെ പ്രധാന വെല്ലുവിളി. ഈ സംഘം ഇപ്പോൾ ഒരു കൃത്രിമ മസ്തിഷ്കം നിർമ്മിക്കാനുള്ള ശ്രമത്തിലാണ്. കെയി എന്നാണ് ഇതിന് പേരിട്ടിരിക്കുന്നത്. ഘ്രാണശക്തിയുള്ള മോട്ടോർ ശലഭം ഈ ലക്ഷ്യത്തിലേക്കുള്ള ഒരു ചവിട്ടുപടിയാണ് എന്ന് അദ്ദേഹം കൂട്ടിച്ചേര്ക്കുന്നു.
സ്വീഡനിനെ ഒറെബ്രോ സർവ്വകലാശാലയിൽ റോബോട്ടുകളുടെ ചലനത്തെയും ഘ്രാണശേഷിയേയും കുറിച്ച് പഠിക്കുന്ന പരീക്ഷണശാലയ്ക്ക് നേതൃത്വം കൊടുക്കുന്ന അചിം ലിലിയെന്തൽ പറയുന്നത് റോബോട്ടുകളെ സംബന്ധിച്ച് ഗന്ധം കാഴ്ച്ചയെക്കാളും സങ്കീർണ്ണമായ കാര്യമാണെന്നാണ്. വെളിച്ചമുള്ളിടത്തോളം ക്യാമറകൾക്ക് ഒരു വസ്തുവിനെ കാണാം. പക്ഷേ, ഗന്ധം വായുവിൽ ശകലങ്ങളായിട്ടാണ് നിൽക്കുന്നത്. ഇവ ഒരേ അളവിലല്ല എന്നത് ഉറവിടം കണ്ടെത്തുന്നതും വിഷമകരമാക്കുന്നുണ്ട്.
പഴയ ഒരു മാലിന്യപ്രദേശത്തുനിന്ന് പുറത്തുവരുന്ന മീഥേനാണ് ലിലിയെന്തൽ ഉദാഹരണമായി ചൂണ്ടിക്കാട്ടുന്നത്. ഈ മാലിന്യക്കൂമ്പാരം ജീർണ്ണിക്കുന്നത് വഴി ഉണ്ടാകുന്ന വാതകം പിടിച്ചെടുക്കുന്നതിനും സമീപത്തെ ആശുപത്രിയുടെ ആവശ്യത്തിനായി ഉപയോഗിക്കുന്നതിനും വേണ്ടി ഒരു സംവിധാനം നഗരത്തിനുണ്ട്. പക്ഷേ കാലക്രമത്തിൽ മാലിന്യക്കൂമ്പാരത്തിലെ പ്ലാസ്റ്റിൿ പാളിക്ക് വിള്ളൽ വീണപ്പോൾ പകുതിയിലധികം മീഥേൻ ചോര്ന്നുപോകാന് തുടങ്ങി. വാതകചോർച്ച മണത്തറിയാൻ ഒരു ഉദ്യോഗസ്ഥനെ നിയമിച്ചെങ്കിലും മനുഷ്യന്റെ മൂക്ക് അതിനു സമർത്ഥമല്ലാതിരുന്നതിനാൽ ഫലമൊന്നുമുണ്ടായില്ല.
ഇവിടെയാണ് ലിലിയെന്തൽ “ഗാസ്ബോ”ട്ടിനെ അവതരിപ്പിക്കുന്നത്. കാഴ്ച്ചയ്ക്ക് ഇത് ഒരു ലോഹത്തണ്ടിനറ്റത്ത് വലിയ ലോഹക്കണ്ണുറപ്പിച്ച ഒരു പുല്ലുചെത്തുയന്ത്രം പോലിരിക്കും. ഏതു നിലത്തുകൂടിയും നീങ്ങുന്ന ഈ വാഹനം രണ്ട് ലേസർ രശ്മികളുപയോഗിച്ച് മണങ്ങളറിയുന്നു: ഒന്ന് മീഥേഷ്യന്റെ രാസസാന്നിധ്യം ആഗിരണം ചെയ്ത് അതിന് വായുവിലുള്ള സാന്ദ്രത നിർണ്ണയിക്കുന്നു. മറ്റെത് ഈ വാതകപടലത്തിന്റെ ഒരു ത്രിമാനപടം രൂപപ്പെടുത്തുന്നതിനുള്ളതാണ്. വാതകപടലവുമായി മനുഷ്യന്റെ നേരിട്ടുള്ള ഇടപെടലില്ലാതെ ലേസറുകൾവഴി അതിന്റെ സാന്നിധ്യം ദൂരത്തുനിന്ന് മനസ്സിലാക്കുന്നു എന്നതാണ് ഈ ഗാസ്ബോട്ടിന്റെ ഗുണം.ഒട്ടുമിക്ക വാതകസെൻസറുകളും (പുകപരിശോധകങ്ങൾ പോലുള്ളവ) ബാഹ്യമായ മണം പിടിച്ചെടുക്കുകയാണ് ചെയ്യുന്നത്. എന്നാൽ ഗ്യാസ്ബോട്ടുകൾ അവയുടെ ലേസറുകൾ ഉപയോഗിച്ച് ദൂരെനിന്നുതന്നെ വാതകസാന്നിധ്യം തിരിച്ചറിയുന്നു.
കാര്യക്ഷമമായ ജലാന്തരറോബോട്ടുകൾ നിർമ്മിക്കുന്നതിലും ശാസ്ത്രജ്ഞർ പ്രയത്നിക്കുന്നുണ്ട്. ക്യാമറകൾക്ക് നന്നായി പ്രവർത്തിക്കാനാവശ്യമായ വെളിച്ചം ഇല്ലാതിരിക്കുന്നതും ചുഴികളും ഗന്ധത്തെയും രാസപടലങ്ങളെയും അസംവേദ്യമാക്കുന്നതും ഈ കൃത്യം വളരെ ദുഷ്കരമാക്കുന്നുണ്ട്. ഈ ആവശ്യത്തിലേക്കായി യൂറോപ്യൻ ഗ്രൂപ്പ് ഒരു റോബോട്ടിനെ നിർമ്മിച്ചിട്ടുണ്ട്. ഇത് പാർശ്വരേഖാസംവേദനം (lateral line sensing) ഉപയോഗിച്ചാണ് പ്രവർത്തിക്കുന്നത്. പാർശ്വരേഖ എന്നത് മീനുകളുടെ ശരീരത്തിൽ തലയ്ക്കു പിൻഭാഗം മുതൽ വാൽ വരെ നീളുന്ന നാഡീകോശങ്ങളുടെ ഒരു നിരയാണ്. ഇത് അവയെ നീരൊഴുക്കിന്റെ ദിശയും വേഗവും അറിയാനും അതുവഴി ഇരപിടിക്കാനും മറ്റുള്ളവരുമായി തട്ടിമുട്ടാതെ ഒന്നിച്ച് നീന്താനും സഹായിക്കുന്നു.

എസ്റ്റോണിയയിലെ ടാല്ലിൻ സാങ്കേതികവിദ്യാ സർവ്വകലാശാലയിൽ ജൈവറോബോട്ടിക്സിന്റെ പ്രൊഫസറായ മാർജ്ജ ക്രൂസ്മായുടെ അഭിപ്രായത്തിൽ, 30,000-ത്തിലധികം മത്സ്യവർഗ്ഗങ്ങൾ പാർശ്വരേഖാസംവേദനം ഉപയോഗിക്കുന്നുണ്ട്. അദ്ദേഹവും സഹപ്രവർത്തകരും ഇതിന് ഒരു ഇലെക്ട്രോണിക് പകർപ്പ് നിർമ്മിക്കാൻ ഇറങ്ങിത്തിരിച്ചിരിക്കുകയാണ്. അന്തർജ്ജലറോബോട്ടുകൾക്ക് നീരൊഴുകിൽ കാര്യക്ഷമമായി സഞ്ചരിക്കാൻ ഇതു സഹായിക്കുന്നു. നാലുവർഷത്തെ പഠനങ്ങൾക്കുശേഷം അവർ മഴവിൽമീനിന്റെ രൂപത്തിലുള്ള ഫിലോസ് (FILOSE – Robotic FIsh LOcomotion and SEnsing) എന്ന റോബോട്ടിനെ ആവിഷ്കരിച്ചു. റോബോട്ടിനു ചുറ്റും ഒഴുകുന്ന വെള്ളത്തിന്റെ മർദ്ദവ്യതിയാനത്തെ നിരീക്ഷിക്കാൻ ചെറിയ സെൻസറുകളും ഇവർ വികസിപ്പിച്ചു. ഇത് ഊർജ്ജത്തിന്റെ ആവശ്യമില്ലാതെ ഒരു വസ്തുവുണ്ടാക്കുന്ന ഓളത്തെ പിന്തുടർന്ന് റോബോട്ടിന് സഞ്ചരിക്കാൻ പര്യാപ്തമാക്കുന്നുണ്ട് എന്നാണ് ക്രൂസ്മയുടെ വാദം.
ഒരു ചെറിയ ഇലക്ട്രിൿ മോട്ടോർ ഉപയോഗിച്ച് സഞ്ചരിക്കുന്നതാണ് ഈ റോബോട്ട്. ഇതിൽ നിരീക്ഷണത്തിനായി ഒരു വിഡിയോക്യാമറയോ മലിനീകരണം തിരിച്ചറിയാൻ രാസ സെൻസറുകളോ ഘടിപ്പിക്കാവുന്നതാണ്. ഫിലോസിനെ ലാബിനു പുറത്ത് നീന്താനിറക്കി അത് യഥാർത്ഥലോകത്ത് എങ്ങനെ പ്രവർത്തിക്കുന്നു എന്ന് അറിയുകയാണ് അടുത്ത പടി.
സ്വന്തമായി തീരുമാനങ്ങളെടുക്കാൻ കഴിവുള്ള ജലാന്തരറോബോട്ടുകൾ രൂപകല്പനചെയ്യുകയാണ് മോണ്ടെറേ ബേ അക്വേറിയം റിസർച്ച് ഇൻസ്റ്റിറ്റ്യൂട്ടിൽ സ്വപ്രേരിതറോബോട്ടിക്സിൽ ഗവേഷണം നടത്തുന്ന കണ്ണരാജൻ. എണ്ണച്ചോർച്ച കണ്ടെത്താൻ, ശാസ്ത്രജ്ഞരുടെ നിർദ്ദേശപ്രകാരം സമുദ്രാന്തർ ഭാഗത്ത് മത്സ്യങ്ങളുടെ ആവാസസ്ഥാനം കണ്ടെത്താൻ, പൊട്ടിത്തെറിച്ചേക്കാവുന്ന ജലാന്തര അഗ്നിപർവ്വതങ്ങൾ കണ്ടെത്താനുമൊക്കെ എവിടേക്കു നീങ്ങണം എന്ന് നിർണ്ണയിക്കാൻ ഇവ സെൻസറുകൾ ഉപയോഗിക്കുന്നു.
പത്തുവർഷം മുമ്പ് ചൊവ്വയിൽ ഇറങ്ങിയ റോവേർസ് വികസിപ്പിക്കുന്നതിൽ പങ്കുവഹിച്ച ഒരു മുൻ നാസാ ഗവേഷകനാണ് രാജൻ. ബഹിരാകാശത്ത് പ്രവർത്തിക്കാൻ സമർത്ഥമായ ഒരു റോബോട്ടിനെ നിർമ്മിക്കുന്നതിനെക്കാളും വിഷമമാണ് ജലാന്തർഭാഗത്ത് പ്രവർത്തിക്കുന്ന ഒരു റോബോട്ടിനെ നിർമ്മിക്കാൻ എന്ന് അദ്ദേഹം പറയുന്നു. താരതമ്യേന ശൂന്യമായ ബഹിരാകാശം സന്ദേശങ്ങളുടെ സഞ്ചാരത്തിനും തദ്വാരാ ആശയവിനിമയത്തിനും അനുയോജ്യമാണ് എന്നതാണ് കാരണം. എന്നാൽ ജലാന്തർഭാഗത്ത് ഉഷ്ണജലത്തിന്റെയും ശീതജലത്തിന്റെയും പാളികളാലും മെല്ലെനീങ്ങന്ന ജലാന്തർവാതങ്ങളാലും കപ്പലുകളുടെയും ജലജീവികളുടെയും ഒച്ചകളാലും ആശയവിനിമയം പലപ്പൊഴും തടയപ്പെടുന്നു. കടലിന്റെ ലവണത്വം റോബോട്ടുകളെ തണുത്ത താപനിലയുള്ള ബഹിരാകാശത്തെ അപേക്ഷിച്ച് വളരെ പെട്ടെന്ന് ജീർണ്ണിപ്പിക്കുകയും ചെയ്യും – രാജൻ പറയുന്നു.
“കടൽ വളരെ പരുക്കനാണ്.” അദ്ദേഹം പറയുന്നു. “ഗഹനമായ ബഹിരാകാശത്തെത്തിയാൽ അവിടെ നിങ്ങൾ ഒറ്റയായിരിക്കും; നിങ്ങൾ എന്തുചെയ്യുന്നെന്നതിൽ നിങ്ങൾക്ക് അതീവ ശ്രദ്ധാലുവായിരിക്കും. ചൊവ്വയിൽപ്പോലും നിങ്ങൾക്ക് നിങ്ങളുടെ റോബോട്ടുമായി ആശയവിനിമയം നടത്താനാകും.”
അപ്പോൾ, യഥാർത്ഥലോകത്ത് പ്രവർത്തിക്കുന്ന, കാണുകയും, മണംപിടിക്കുകയും സംവേദിക്കുകയും ചെയ്യുന്ന റോബോട്ടിന്റെ വിജയസാധ്യതകൾ എന്തൊക്കെയാണ്? ഇക്കാര്യം സമീപകാലത്ത് സാക്ഷാത്കരിക്കപ്പെടുമെന്നൊന്നും കരുതാനാവില്ല.—ബോസ്റ്റൺ സർവ്വകലാശാലയിലെയും വൂഡ്സ് ഹോൾ ഓഷിയനോഗ്രഫിൿ ഇൻസ്റ്റിറ്റ്യൂഷനിലെയും ജീവശാസ്ത്രപ്രൊഫസറായ ജെല്ലെ അതെമ പറയുന്നു.
(Niiler is a freelance science and technology writer based in Chevy Chase, Md.)




